Analog-til-digital og digital-til-analog omformere. Analog til digital konvertering for nybegynnere
Artikkelen beskriver design- og driftsprinsippene til analog-til-digital-omformere av ulike typer, samt deres hovedegenskaper angitt av produsenter i dokumentasjonen.
Analog-til-digital omformer (ADC) er en av de viktigste elektroniske komponenter innen måle- og testutstyr. ADC-en konverterer spenningen (analogt signal) til en kode, som mikroprosessoren og programvare utføre visse handlinger. Selv om du bare jobber med digitale signaler, bruker du mest sannsynlig en ADC som en del av et oscilloskop for å finne ut deres analoge egenskaper.
Det finnes flere grunnleggende typer ADC-arkitektur, selv om det også er mange variasjoner innenfor hver type. Ulike typer måleutstyr bruk Forskjellige typer ADC. For eksempel i digitalt oscilloskop en høy samplingshastighet brukes, men høy oppløsning er ikke nødvendig. I digitale multimetre Du trenger større oppløsning, men du kan ofre målehastigheten. Generelle datainnsamlingssystemer faller vanligvis mellom oscilloskop og digitale multimetre i samplingshastighet og oppløsning. Denne typen utstyr bruker suksessive tilnærmings-ADC-er eller sigma-delta-ADC-er. Det finnes også parallelle ADC-er for applikasjoner som krever høyhastighets analog signalbehandling, og som integrerer ADC-er med høy oppløsning og støyreduksjon.
I fig.1. Mulighetene til de viktigste ADC-arkitekturene vises avhengig av oppløsningen og samplingsfrekvensen.
Ris. 1. ADC-typer - oppløsning avhengig av samplingsfrekvens
Parallelle ADC-er
De fleste høyhastighetsoscilloskoper og noen høyfrekvente måleinstrumenter bruker parallelle ADC-er på grunn av deres høye konverteringshastighet, som kan nå 5G (5x10 9) prøver/sek. standard enheter og 20G prøver/sek. for originale design. Vanligvis har parallelle ADC-er en oppløsning på opptil 8 biter, men 10-bitsversjoner er også tilgjengelige.

Ris. 2. Parallellkonvertering ADC
Ris. 2 viser et forenklet blokkskjema av en 3-bits parallell ADC (for høyoppløselige omformere er driftsprinsippet det samme). Den bruker en rekke komparatorer, som hver sammenligner inngangsspenningen med en individuell referansespenning. Denne referansespenningen for hver komparator er dannet på en innebygd presisjonsresistiv deler. Referansespenningene starter ved halvparten av det minste signifikante sifferet (LSB) og øker med hver komparator i trinn på V REF /2 3 . Som et resultat krever en 3-bits ADC 2 3 -1 eller syv komparatorer. Og for eksempel, for en 8-bits parallell ADC, vil det være nødvendig med 255 (eller (2 8 -1)) komparatorer.
Når inngangsspenningen øker, setter komparatorene sekvensielt utgangene sine til en logisk en i stedet for en logisk null, og starter med komparatoren som er ansvarlig for den minst signifikante biten. Du kan tenke på omformeren som et kvikksølvtermometer: når temperaturen stiger, stiger kvikksølvkolonnen. I fig. 2, faller inngangsspenningen i intervallet mellom V3 og V4, så de 4 nederste komparatorene har en "1"-utgang, og de tre øverste komparatorene har en "0"-utgang. Dekoderen konverterer det (2 3 -1) bit digitale ordet fra utgangene til komparatorene til en binær 3-bits kode.
Parallelle ADC-er er nok raske enheter, men de har sine ulemper. På grunn av behovet for å bruke et stort antall komparatorer, bruker parallelle ADC-er betydelig strøm og er ikke praktiske for bruk i batteridrevne applikasjoner.
Når en oppløsning på 12, 14 eller 16 bit er nødvendig og høy konverteringshastighet ikke er nødvendig, og de avgjørende faktorene er lav pris og lavt energiforbruk, så brukes vanligvis en suksessiv tilnærming ADC. Denne typen ADC brukes oftest i en rekke måleinstrumenter og i datainnsamlingssystemer. I for tiden Suksessive tilnærmings-ADC-er lar deg måle spenning med en nøyaktighet på opptil 16 biter med en samplingsfrekvens fra 100K (1x10 3) til 1M (1x10 6) prøver/sek.
Ris. 3 viser et forenklet blokkskjema av en suksessiv tilnærmings-ADC. Denne typen ADC er basert på et spesielt suksessivt tilnærmingsregister. Ved begynnelsen av konverteringssyklusen settes alle utganger fra dette registeret til logisk 0, med unntak av den første (mest signifikante) biten. Dette danner utgangen til det interne digital-til-analog omformer(DAC) et signal hvis verdi er lik halve inngangsområdet til ADC. Og komparatorutgangen bytter til en tilstand som bestemmer forskjellen mellom signalet på DAC-utgangen og den målte inngangsspenningen.

Ris. 3. Suksessiv tilnærming ADC
For eksempel, for en 8-bits suksessiv tilnærming ADC (fig. 4), er registerutgangene satt til "10000000". Hvis inngangsspenningen er mindre enn halvparten av ADC-inngangsområdet, vil utgangen fra komparatoren være logisk 0. Dette instruerer det suksessive tilnærmingsregisteret om å bytte utgangene sine til tilstanden "01000000", som tilsvarende vil endre utgangsspenningen fra DAC levert til komparatoren. Hvis komparatorutgangen fortsatt forble på "0", ville registerutgangene byttet til tilstanden "00100000". Men på dette konverteringstrinnet utgangsspenning DAC-en er mindre enn inngangsspenningen (figur 4), og komparatoren bytter til en logisk 1-tilstand. Dette instruerer det suksessive tilnærmingsregisteret om å lagre en "1" i den andre biten og bruke en "1" til den tredje biten. Den beskrevne driftsalgoritmen gjentas deretter igjen til siste siffer. En SAR ADC krever derfor én intern konverteringsklokke for hver bit, eller N klokkesykluser for N-bits konvertering.

Ris. 4. Konvertering av suksessive tilnærminger til ADC
Imidlertid har driften av en suksessiv tilnærming ADC en særegenhet knyttet til forbigående prosesser i den interne DAC. Teoretisk sett bør spenningen ved DAC-utgangen for hver av de N interne konverteringsklokkene stilles inn i samme tidsperiode. Men faktisk er dette gapet i de første tiltakene mye større enn i det siste. Derfor er konverteringstiden til en 16-bits SAR ADC mer enn det dobbelte av konverteringstiden til en 8-bits SAR ADC av denne typen.
De fleste målinger krever ofte ikke en ADC med konverteringshastigheten til en SAR ADC, men det kreves større oppløsning. Sigma-delta ADC-er kan gi oppløsninger på opptil 24 biter, men er dårligere i konverteringshastighet. Så, i en sigma-delta ADC med 16 biter kan du få en samplingshastighet på opptil 100K samples/sek, og med 24 bits faller denne frekvensen til 1K samples/sek eller mindre, avhengig av enheten.
Vanligvis brukes sigma-delta ADC-er i en rekke datainnsamlingssystemer og måleutstyr (måling av trykk, temperatur, vekt, etc.) når en høy samplingshastighet ikke er nødvendig og en oppløsning på mer enn 16 biter er nødvendig.
Driftsprinsippet til en sigma-delta ADC er vanskeligere å forstå. Denne arkitekturen tilhører klassen av integrerende ADC-er. Men hovedtrekket til sigma-delta ADC er at samplingsfrekvensen, der spenningsnivået til det målte signalet faktisk analyseres, overstiger frekvensen av samples ved ADC-utgangen (samplingsfrekvensen). Denne samplingsfrekvensen kalles resamplingsfrekvensen. En 100K samples/sek sigma-delta ADC som bruker 128 ganger oversamplingshastigheten vil sample det analoge inngangssignalet med 12,8M samples/sek.
Blokkdiagrammet for en førsteordens sigma-delta ADC er vist i fig. 5. Det analoge signalet mates til en integrator, hvis utganger er koblet til en komparator, som igjen er koblet til en 1-bits DAC i tilbakekoblingssløyfen. Gjennom en serie påfølgende iterasjoner produserer integratoren, komparatoren, DAC og addereren en strøm av sekvensielle biter som inneholder informasjon om størrelsen på inngangsspenningen.

Ris. 5. Sigma-delta ADC
Den resulterende digitale sekvensen blir deretter påført et lavpassfilter for å avvise komponenter med frekvenser over Kotelnikov-frekvensen (som er halvparten av ADC-samplingsfrekvensen). Etter å ha fjernet høyfrekvente komponenter, tynner den neste noden, desimatoren, ut dataene. I ADC-en vi vurderer, vil desimatoren etterlate 1 bit av hver 128 mottatt i den digitale utgangssekvensen.
Siden det interne digitale lavpassfilteret i sigma-delta ADC er en integrert del av konverteringsprosessen, blir lavpassfilterets innstillingstid en faktor å vurdere når inngangssignalet endres brått. For eksempel, når du bytter inngangsmultiplekseren eller når du bytter målegrensen til enheten, må du vente til flere ADC-prøver har passert, og først da lese de riktige utdataene.
En ekstra og veldig viktig fordel med sigma-delta ADC er at alle dens interne komponenter kan implementeres på en integrert måte på arealet til en silisiumkrystall. Dette reduserer kostnadene for sluttenheter betydelig og øker stabiliteten til ADC-karakteristikker.
Integrering av ADC-er
Og den siste typen ADC som vil bli diskutert her er en push-pull integrasjon ADC. Digitale multimetre bruker som regel nettopp slike ADC-er, fordi Disse måleinstrumentene krever en kombinasjon høy oppløsning og høy støydemping. Konseptet med konvertering i en slik integrerende ADC er mye mindre kompleks enn i en sigma-delta ADC.
Figur 6 viser driftsprinsippet for en push-pull-integrasjon ADC. Inngangssignalet lader kondensatoren for en fast tidsperiode, som vanligvis er en syklus av nettfrekvensen (50 eller 60 Hz) eller et multiplum av denne. Ved å integrere inngangssignalet over en tidsperiode av denne lengden, undertrykkes høyfrekvent interferens. Samtidig elimineres påvirkningen av spenningsustabilitet til nettstrømforsyningen på konverteringsnøyaktigheten. Dette skjer fordi verdien av integralet til et sinusformet signal er null hvis integrasjonen utføres i et tidsintervall som er et multiplum av endringsperioden til sinusoiden.

Ris. 6. Integrering av ADC. Grønn farge viser nettverksinterferens (1 punktum)
Når ladetiden er fullført, utlader ADC kondensatoren med en fast hastighet, mens en intern teller teller antall klokkepulser i løpet av kondensatorutladingstiden. En lengre utladningstid tilsvarer dermed en større målerstand og en større målt spenning (fig. 6).
Push-pull-integrasjon ADC-er har høy nøyaktighet og høy oppløsning, og har også en relativt enkel struktur. Dette gjør det mulig å implementere dem i form av integrerte kretser. Den største ulempen med slike ADC-er er stor tid transformasjon på grunn av binding av integrasjonsperioden til varigheten av forsyningsnettperioden. For eksempel, for 50 Hz utstyr, overstiger ikke samplingsfrekvensen til en push-pull integrering ADC 25 sampler/sek. Selvfølgelig kan slike ADC-er operere med en høyere samplingsfrekvens, men når sistnevnte øker, reduseres støyimmuniteten.
ADC-spesifikasjon
Det er generelle definisjoner som ofte brukes i forhold til analog-til-digital-omformere. Imidlertid er egenskapene gitt i teknisk dokumentasjon ADC-produsenter kan virke ganske forvirrende. Riktig valg av den optimale kombinasjonen av ADC-egenskaper for en spesifikk applikasjon krever en nøyaktig tolkning av dataene gitt i den tekniske dokumentasjonen.
De mest forvirrede parametrene er oppløsning og nøyaktighet, selv om disse to egenskapene til en ekte ADC er ekstremt løst relatert til hverandre. Oppløsning er ikke det samme som nøyaktighet; en 12-bits ADC kan ha mindre presisjon enn en 8-bits ADC. For en ADC er oppløsning et mål på hvor mange segmenter inngangsområdet til det analoge signalet som måles kan deles inn i (for eksempel for en 8-bits ADC er dette 28=256 segmenter). Nøyaktighet karakteriserer det totale avviket til konverteringsresultatet fra dets ideelle verdi for en gitt inngangsspenning. Det vil si at oppløsningen karakteriserer de potensielle egenskapene til ADC, og settet med nøyaktighetsparametere bestemmer gjennomførbarheten av slike potensielle evner.
ADC konverterer analogt inngangssignal til utgang digital kode. For ekte omformere produsert i form av integrerte kretser, er konverteringsprosessen ikke ideell: den påvirkes av både teknologisk variasjon i parametere under produksjon og forskjellige eksterne støy. Derfor blir den digitale koden ved ADC-utgangen bestemt med en feil. Spesifikasjonen for ADC indikerer feilene levert av omformeren selv. De er vanligvis delt inn i statiske og dynamiske. I dette tilfellet er det den endelige søknaden som avgjør hvilke ADC-karakteristikker som vil anses som avgjørende, de viktigste i hvert enkelt tilfelle.
Statisk feil
I de fleste applikasjoner brukes ADC-er til å måle sakte varierende, lavfrekvent signal(for eksempel fra en temperatursensor, trykksensor, fra en strekkmåler osv.), når inngangsspenningen er proporsjonal med en relativt konstant fysisk mengde. Her spilles hovedrollen av den statiske målefeilen. I ADC-spesifikasjonen er denne typen feil definert som additiv feil (Offset), multiplikativ feil (Full-Scale), differensiell ikke-linearitet (DNL), integral ikke-linearitet (INL) og kvantiseringsfeil. Disse fem egenskapene lar oss beskrive fullt ut statisk feil ADC.
Ideell ADC-overføringskarakteristikk
Overføringskarakteristikken til en ADC er en funksjon av avhengigheten av koden ved utgangen til ADC av spenningen ved dens inngang. En slik graf er en stykkevis lineær funksjon av 2N "trinn", der N er ADC-kapasiteten. Hvert horisontale segment av denne funksjonen tilsvarer en av ADC-utgangskodeverdiene (se fig. 7). Hvis vi forbinder begynnelsen av disse horisontale segmentene med linjer (ved grensene for overgangen fra en kodeverdi til en annen), vil den ideelle overføringskarakteristikken være en rett linje som går gjennom origo.

Ris. 7. Ideell overføringskarakteristikk for 3-bits ADC
Ris. Figur 7 illustrerer den ideelle overføringskarakteristikken for en 3-bits ADC med testpunkter ved kodeovergangsgrenser. Utgangskoden tar sin minste verdi (000b) når inngangssignalet er mellom 0 og 1/8 full skala (maksimal kodeverdi for denne ADC). Det bør også bemerkes at ADC vil nå fullskalakodeverdien (111b) ved 7/8 full skala, ikke i full skala. At. Overgangen til maksimal utgangsverdi skjer ikke ved en fullskalaspenning, men ved en verdi mindre enn det minste signifikante sifferet (LSB) enn den inngående fullskalaspenningen. Overføringskarakteristikken kan implementeres med en -1/2 LSB offset. Dette oppnås ved å forskyve overføringskarakteristikken til venstre, som forskyver kvantiseringsfeilen fra området -1... 0 LSB til området -1/2... +1/2 LSB.

Ris. 8. Overføringskarakteristikk for en 3-bits ADC med en offset på -1/2LSB
På grunn av den teknologiske variasjonen i parametere under produksjonen av integrerte kretser, har ikke ekte ADC-er en ideell overføringskarakteristikk. Avvik fra den ideelle overføringskarakteristikken bestemmer den statiske feilen til ADC og er gitt i den tekniske dokumentasjonen.
Den ideelle ADC-overføringskarakteristikken krysser origo, og den første kodeovergangen skjer når verdien på 1 LSB er nådd. Additiv feil (offset-feil) kan defineres som forskyvningen av hele overføringskarakteristikken til venstre eller høyre i forhold til aksen til inngangsspenningen, som vist i fig.9. Dermed er 1/2 LSB offset med vilje inkludert i ADC additiv feildefinisjon.

Ris. 9. Additiv feil (Offset Error)
Multiplikativ skjevhet
Multiplikativ feil (fullskalafeil) er forskjellen mellom den ideelle og faktiske overføringskarakteristikken ved punktet for maksimal utgangsverdi, forutsatt null additiv feil (ingen offset). Dette manifesterer seg som en endring i helningen til overføringsfunksjonen, som illustrert i fig. 10.

Ris. 10. Multiplikativ feil (fullskalafeil)
For en ideell ADC-overføringskarakteristikk, bør bredden på hvert "trinn" være den samme. Forskjellen i lengden på de horisontale segmentene av denne stykkevis lineær funksjon av 2N "trinn" representerer differensiell ikke-linearitet (DNL).
Verdien av det minst signifikante sifferet i ADC er Vref/2N, der Vref er referansespenningen, N er ADC-oppløsningen. Spenningsforskjellen mellom hver kodeovergang må være lik LSB-verdien. Avviket til denne forskjellen fra LSB er definert som differensiell ikke-linearitet. I figuren er dette vist som ulikt intervall mellom kode-"trinn" eller som "uskarphet" av overgangsgrenser på ADC-overføringskarakteristikken.

Ris. 11. Differensiell ikke-linearitet (DNL)
Integrert ikke-linearitet
Integral ikke-linearitet (INL) er feilen som er forårsaket av avviket i den lineære funksjonen til ADC-overføringskarakteristikken fra en rett linje, som vist i fig. 12. Vanligvis Overføringsfunksjon med integral ikke-linearitet tilnærmes med en rett linje ved bruk av minste kvadraters metode. Ofte forbinder den omtrentlige rette linjen ganske enkelt den minste og høyeste verdi. Integrert ikke-linearitet bestemmes ved å sammenligne spenningene som kodeoverganger skjer ved. For en ideell ADC vil disse overgangene skje ved inngangsspenningsverdier som er nøyaktig multipler av LSB. Men for en ekte omformer kan denne tilstanden møtes med feil. Forskjellen mellom de "ideelle" spenningsnivåene der en kodeovergang skjer og deres faktiske verdier er uttrykt i LSB-enheter og kalles integrert ikke-linearitet.

Ris. 12. Integrert ikke-linearitet (INL)
Kvantiseringsfeil
En av de viktigste feilkomponentene i ADC-målinger, kvantiseringsfeil, er et resultat av selve konverteringsprosessen. Kvantiseringsfeil er feilen forårsaket av kvantiseringstrinnverdien og er definert som? Least Significant Bit (LSB) verdier. Det kan ikke utelukkes i analog-til-digital konverteringer, siden det er en integrert del av konverteringsprosessen, bestemmes av oppløsningen til ADC og ikke endres fra ADC til ADC med lik oppløsning.
Dynamiske egenskaper
De dynamiske egenskapene til en ADC bestemmes vanligvis ved hjelp av spektral analyse, basert på resultatene av å utføre en rask Fourier-transformasjon (FFT) på en rekke ADC-utgangsverdier som tilsvarer et testinngangssignal.
I fig. Figur 13 viser et eksempel på frekvensspekteret til det målte signalet. Nullharmonikken tilsvarer grunnfrekvensen til inngangssignalet. Alt annet er støy, som inneholder harmonisk forvrengning, termisk støy, 1/f-støy og kvantiseringsstøy. Noen støykomponenter genereres av ADC selv, mens andre kan komme til ADC-inngangen fra eksterne kretser. Harmonisk forvrengning, for eksempel, kan inneholdes i det målte signalet og genereres samtidig av ADC under konverteringsprosessen.

Ris. 13. Resultat av å utføre FFT på ADC-utdata
Signal til støyforhold
Signal-til-støy-forhold (SNR) er forholdet mellom rms-verdien til inngangssignalet og rms-verdien til støyen (unntatt harmonisk forvrengning), uttrykt i desibel:
SNR(dB) = 20 log [Vsignal(rms)/Vnoise(rms)]
Denne verdien lar deg bestemme andelen støy i det målte signalet i forhold til nyttesignalet.

Ris. 14. SNR - Signal til støyforhold

Ris. 15. FFT reflekterer harmonisk forvrengning
Støyen målt i SNR-beregningen inkluderer ikke harmonisk forvrengning, men inkluderer kvantiseringsstøy. For en ADC med en viss oppløsning er det kvantiseringsstøyen som begrenser omformerens muligheter til det teoretisk beste signal-til-støy-forholdet, som er definert som:
SNR(db) = 6,02 N + 1,76,
hvor N er oppløsningen til ADC.
Støyspekter ADC kvantisering standardarkitekturer har en jevn frekvensfordeling. Derfor kan ikke størrelsen på denne støyen reduseres ved å øke konverteringstiden og deretter beregne gjennomsnittet av resultatene. Kvantiseringsstøy kan kun reduseres ved å måle med en større ADC.
Det særegne med sigma-delta ADC er at kvantiseringsstøyspekteret er ujevnt fordelt over frekvensen - det er forskjøvet mot høye frekvenser. Derfor, ved å øke måletiden (og følgelig antall prøver av det målte signalet), akkumulere og deretter midlere den resulterende prøven (lavpassfilter), er det mulig å oppnå måleresultater med høyere nøyaktighet. Naturligvis vil den totale konverteringstiden øke.
Andre kilder til ADC-støy inkluderer termisk støy, 1/f-støy og referansefrekvensjitter.
Total harmonisk forvrengning
Ikke-linearitet i resultatene av datakonvertering fører til harmonisk forvrengning. Slike forvrengninger observeres som "pigger" i frekvensspekteret ved jevne og odde harmoniske i det målte signalet (fig. 15).
Denne forvrengningen er definert som total harmonisk forvrengning (THD). De er definert som:

Mengden av harmonisk forvrengning avtar ved høye frekvenser til et punkt hvor amplituden til harmoniske blir mindre enn støynivået. Således, hvis vi analyserer bidraget til harmonisk forvrengning til konverteringsresultatene, kan dette gjøres enten over hele frekvensspekteret, samtidig som amplituden til harmonikkene begrenses til støynivået, eller ved å begrense frekvensbåndet for analyse. For eksempel, hvis systemet vårt har et lavpassfilter, da høye frekvenser Vi er rett og slett ikke interessert i høyfrekvente harmoniske og kan ikke tas i betraktning.
Signal-til-støy-forhold og forvrengning
Signal to Noise and Distortion (SiNAD) beskriver mer fullstendig støyegenskaper ADC. SiNAD tar hensyn til størrelsen på både støy og harmonisk forvrengning i forhold til ønsket signal. SiNAD beregnes ved å bruke følgende formel:


Ris. 16. Harmonisk fritt dynamisk område
ADC-spesifikasjonen, gitt i den tekniske dokumentasjonen for mikrokretsene, hjelper til med rimelig valg av omformer for en spesifikk applikasjon. Som et eksempel kan du vurdere spesifikasjonen til en ADC integrert i den nye C8051F064 mikrokontrolleren produsert av Silicon Laboratories.
Mikrokontroller C8051F064
C8051F064-brikken er en høyhastighets 8-bits mikrokontroller for kombinert analog og digital signalbehandling med to integrerte 16-bits SAR ADC-er. Innebygde ADC-er kan operere i enkeltleder- og differensialmoduser med maksimal ytelse opptil 1M prøver/sek. Tabellen viser hovedegenskapene til ADC-en til C8051F064-mikrokontrolleren. Å uavhengig evaluere de digitale og digitale egenskapene til C8051F064 analog prosessering data, kan du bruke det rimelige evalueringssettet C8051F064EK (fig. 17). Settet inneholder et C8051F064-basert evalueringskort, USB-kabel, dokumentasjon og programvare for å teste de analoge dynamiske og statiske egenskapene til en integrert høypresisjon 16-bits ADC.
Bord. V DD = 3,0 V, AV+ = 3,0 V, AVDD = 3,0 V, V REF = 2,50 V (REFBE=0), -40 til +85° med mindre annet er angitt
| Alternativer | Forhold | Typisk | Maks. | Enheter |
| DC-egenskaper | ||||
| Litt dybde | 16 | bit | ||
| Integrert ikke-linearitet | Enkel ledning | ±0,75 | ±2 | LSB |
| Enkel ledning | ±0,5 | ±1 | LSB | |
| Garantert monotoni | ±+0,5 | LSB | ||
| Additiv feil (offset) | 0,1 | mV | ||
| Multiplikativ skjevhet | 0,008 | %F.S. | ||
| Temperaturøkning | 0,5 | ppm/°C | ||
| Dynamiske egenskaper (Sampling rate 1 Msps, AVDD, AV+ = 3,3 V) | ||||
| Signal/støy og forvrengning | Fin = 10 kHz, enkel ledning | 86 | dB | |
| Fin = 100 kHz, enkel ledning | 84 | dB | ||
| 89 | dB | |||
| 88 | dB | |||
| Total harmonisk forvrengning | Fin = 10 kHz, enkel ledning | 96 | dB | |
| Fin = 100 kHz, enkel ledning | 84 | dB | ||
| Fin = 10 kHz, differensial | 103 | dB | ||
| Fin = 100 kHz, differensial | 93 | dB | ||
| Fin = 10 kHz, enkel ledning | 97 | dB | ||
| Fin = 100 kHz, enkel ledning | 88 | dB | ||
| Fin = 10 kHz, differensial | 104 | dB | ||
| Fin = 100 kHz, differensial | 99 | dB | ||

Ris. 17. Evalueringssett C8051F064EK
Litteratur
- http://www.wbc-europe.com/en/services/pim_application_guide.html
- www.silabs.com
Wolfgang Reis, WBC GmbH
Enhver ADC er en kompleks elektronisk enhet som kan lages i form av en integrert krets eller inneholder et stort antall forskjellige elektroniske komponenter. I denne forbindelse avhenger egenskapene til ADC ikke bare av dens konstruksjon, men også av egenskapene til elementene som utgjør den. De fleste ADC-er blir evaluert av deres grunnleggende metrologiske indikatorer, som kan deles inn i to grupper: statisk og dynamisk.
TIL statiske egenskaper til ADC inkluderer: absolutte verdier og polariteter til inngangssignaler, inngangsmotstand, verdier og polariteter til utgangssignaler, utgangsmotstand, verdier av spenninger og strømmer til strømforsyninger, antall binære eller desimale sifre i utgangskoden, konvertering feil DC spenning og så videre.
TIL dynamiske parametere til ADC inkluderer: konverteringstid, maksimal samplingsfrekvens, blenderåpningstid, dynamisk feil, etc.
La oss se på noen av disse parameterne mer detaljert. Hovedkarakteristikken til en ADC er dens Vedtak , som vanligvis bestemmes av den gjensidige av det maksimale antallet kodekombinasjoner ved ADC-utgangen. Oppløsning kan uttrykkes i prosent, i antall sifre eller i relative enheter.
For eksempel har en 10-bits ADC en oppløsning på (1024) -1 » 10 -3 = 0,1 %. Hvis skalaspenningen for en slik ADC er 10 V, vil den absolutte verdien av oppløsningen være omtrent 10 mV.
Den faktiske oppløsningsverdien avviker fra den beregnede på grunn av ADC-feil. Nøyaktigheten til ADC bestemmes av verdiene for den absolutte feilen, differensial og integrert ikke-linearitet. Den absolutte feilen til ADC bestemmes i sluttpunkt konverteringsegenskaper, så det kalles vanligvis fullskalafeil og måles i LSB-enheter.
Differensiell ikke-linearitet (DNL) bestemt gjennom identiteten til to tilstøtende signalinkrementer, dvs. som forskjellen i spenninger til to tilstøtende kvanter: DNL = hi-h i +1 . Definisjonen av differensiell ikke-linearitet er vist i fig. 2.3 EN.
ADC integral ikke-linearitet (INL) karakteriserer identiteten til trinnene over hele området til inngangssignalet. Det bestemmes vanligvis som vist i fig. 2.3 b, ved det maksimale avviket til den glattede transformasjonskarakteristikken fra en ideell rett linje, dvs. INL = u i " – u i .
Konverteringstid T pr vanligvis definert som tidsintervallet fra starten av konverteringen til en stabil kode for inngangssignalet vises ved ADC-utgangen. For noen typer ADC-er er denne tiden konstant og avhenger ikke av verdien på inngangssignalet; for andre ADC-er avhenger denne tiden av verdien på inngangssignalet. Hvis ADC-en fungerer uten en prøve-og-hold-enhet, er konverteringstiden blendertid.
Maksimal prøvetakingshastighet - dens frekvens som inngangssignalet kan konverteres med, forutsatt at den valgte parameteren (for eksempel absolutt feil) ikke overskrider spesifiserte grenser. Noen ganger tas den maksimale konverteringsfrekvensen til å være lik den gjensidige konverteringstiden. Dette er imidlertid ikke egnet for alle typer ADC-er.

Ris. 2.3. Definisjon av differensiell ikke-linearitet (a)
og integrert ikke-linearitet (b)
Prinsipper for ADC-design
Alle typer ADC-er som brukes kan deles basert på den målte spenningsverdien i to grupper: ADC med øyeblikkelige spenningsverdier og ADC med gjennomsnittlige spenningsverdier (integrering av ADC). La oss først vurdere ADC-er som lar deg bestemme koden for en øyeblikkelig spenningsverdi, og deretter vurdere å integrere ADC-er og funksjonene ved deres bruk.
Øyeblikkelig ADC kan deles inn i følgende hovedtyper: sekvensiell telling, sekvensiell tilnærming, parallell, parallell-sekvensiell og med mellomomregning til et tidsintervall.
Strukturopplegg Serietelling ADC vist i fig. 2.4a. Den inneholder en komparator som sammenligner inngangsspenningen med tilbakekoblingsspenningen. Den direkte inngangen til komparatoren mottar inngangssignalet du inn, og til den inverterende en-spenningen u 5 tilbakemelding. Driften av omformeren begynner med ankomsten av en "START"-puls fra kontrollkretsen (den er ikke vist på figuren), som lukker bryteren S. Gjennom en lukket nøkkel S impulser u 1 fra klokkepulsgeneratoren sendes de til en teller, som styrer driften av digital-til-analog-omformeren (DAC). Som et resultat av en sekvensiell økning i tellerutgangskoden, oppstår en sekvensiell trinnvis økning i utgangsspenningen u 5 DAC. DAC-en får strøm fra en referansespenningskilde u 4.
Når utgangsspenningen til DAC-en er lik inngangsspenningen, bytter komparatoren og dens "STOPP"-utgangssignal åpner bryteren S. Som et resultat vil pulser fra generatoren slutte å komme til tellerinngangen. Utgangskode tilsvarende likhet du inn = u 5 fjernes fra tellerutgangsregisteret.

Ris. 2.4. Blokkdiagram av en seriell tellende ADC (a)
og grafer over konverteringsprosessen (b)
Grafer som illustrerer prosessen med å konvertere spenning til digital kode er vist i fig. 2.4 b. Fra disse grafene kan man se at konverteringstiden er variabel og avhenger av inngangssignalnivået. Når antall binære sifre i telleren er lik n, og repetisjonsperioden for å telle pulser T Maksimal konverteringstid kan bestemmes av formelen:
T pr = (2 n - 1)T. (2.4)
Så for eksempel når n= 10 sifre og T= 1 µs (dvs. når klokkefrekvens 1 MHz) maksimal konverteringstid er
T pr = (2 10 - 1) = 1024 μs » 1 ms.
som gir en maksimal konverteringsfrekvens på ca. 1 kHz.
ADC-konverteringsligningen for serietelling kan skrives som:
kDU = uin,
Hvor 0 < k < n - antall trinn til sammenligning, DU = h- verdien av ett trinn, dvs. kvantiseringstrinnet.
Strukturopplegg suksessiv tilnærming ADC vist i fig. 2.5 EN. Sammenlignet med den sekvensielle tellende ADC-kretsen, er det gjort en betydelig endring i den - i stedet for en teller, har et suksessivt tilnærmingsregister (SAR) blitt introdusert. Dette endret balansealgoritmen og reduserte konverteringstiden.
Driften av en ADC med RPP er basert på prinsippet om dikotomi, dvs. sekvensiell sammenligning av den konverterte spenningen du inn med 1/2, 1/4, 1/8 osv. av dens mulige maksimumsverdi U m. Dette gir rom for n-bit ADC utfører hele konverteringsprosessen i P suksessive tilnærmingstrinn (iterasjoner) i stedet for (2 n -1) ved bruk av sekvensiell telling, og oppnå en betydelig gevinst i ytelse. Grafen over konverteringsprosessen til ADC med RPP er vist i fig. 2.5 b.

Ris. 2.5. Blokkdiagram av en suksessiv tilnærming ADC (a),
grafer av konverteringsprosessen (b) og overgangsdiagram
for en tre-bits ADC (in)
Som et eksempel i fig. 2.5 V viser overgangsdiagrammet for en tre-bits suksessiv tilnærming ADC. Siden verdien av én bit bestemmes ved hvert trinn, starter med den mest signifikante, kalles en slik ADC ofte en bit-for-bit balanserende ADC. Den første sammenligningen avgjør om spenningen er større eller mindre du er med, hvordan Um/2. Det neste trinnet er å finne ut hvilken fjerdedel av området som er innenfor du inn. Hvert påfølgende trinn begrenser området med mulige resultater med halvparten.
Ved hvert sammenligningstrinn genererer komparatoren pulser som tilsvarer "større enn mindre"-tilstanden (1 eller 0), som styrer registeret for suksessive tilnærminger.
Strukturopplegg parallell ADC vist i fig. 2.6. Omformeren kvantiserer inngangssignalet samtidig du inn ved å bruke et sett med komparatorer koblet parallelt med signalkilden. Terskelnivåene til komparatorene settes ved bruk av en resistiv deler i samsvar med kvantiseringsskalaen som brukes. Når et signal påføres inngangene til komparatorene du inn ved deres utganger får vi et kvantisert signal representert i en enhetskode.

Ris. 2.6. Blokkdiagram av parallell ADC
For å konvertere en enhetskode til binær (eller binær-desimal) kode, brukes en kodingsomformer. Når du arbeider i binær kode, har alle delemotstander samme motstand R. Konverteringstiden til en slik omformer er én klokkesyklus, dvs. T pr = T. Parallellomformere er for tiden de raskeste og kan operere med samplingshastigheter på over 100 MHz.
Referansespenningsdeleren er et sett med lavmotstandsmotstander med en motstand på omtrent 1 ohm. Ved å bruke "Correction"-pinnen er det mulig å korrigere nullnivå-forspenningen ved inngangen, og ved å bruke "Correction"-pinnen, U op2- absolutt konverteringsfeil ved endepunktet av skalaen. De nominelle verdiene til referansespenningene er: U op1 =- 0,075 ... 0 V, og U op2= -2,1 ... -1,9 V. Typisk responsforsinkelse for komparatorer er ca. 7 ns.
Strukturopplegg seriell-parallell ADC vist i fig. 2.7. En slik ADC opererer i flere klokkesykluser. I den første klokkesyklusen konverterer ADC-en de mest signifikante bitene av inngangsspenningen du inn inn i en digital kode (i diagrammet er disse sifrene 2 3 ... 2 5). Så, i den andre klokkesyklusen, konverteres disse bitene av DAC til en spenning, som trekkes fra inngangssignalet i subtraktorenheten VU. I den tredje syklusen konverterer ADC 2 den resulterende forskjellen til koden til de minst signifikante bitene av inngangsspenningen du inn .
Slike omformere er preget av lavere hastighet sammenlignet med parallelle, men har et mindre antall komparatorer. Så, for eksempel, for en 6-bits parallell ADC, trengs 64 komparatorer, og for en serieparallell ADC - bare 16.
Antall trinn i slike ADC-er kan økes, og det er grunnen til at de ofte kalles flertrinn eller rørledninger. Utgangskoden til slike ADC-er er summen av koder N = N 1 + N 2 + N 3 +..., generert av separate kaskader.

Ris. 2.7. Blokkdiagram av en parallell-seriell ADC
KONTROLLSPØRSMÅL:
1. Formål og klassifisering av analog-til-digital-omformere.
2. Hovedkarakteristika for ADC.
3. Grunnleggende prinsipper for ADC-konstruksjon.
4. Seriell tellende ADC-krets.
5. Parallell ADC-krets.
6. Parallell-seriell ADC-krets.
7. Opplegg for ADC med suksessive tilnærminger.
3 TYPER BINÆRE KODER
Analog-til-digital omformere (ADC)– Dette er enheter designet for å konvertere analoge signaler til digitale. For en slik konvertering er det nødvendig å kvantisere det analoge signalet, dvs. begrense de øyeblikkelige verdiene til det analoge signalet til visse nivåer, kalt kvantiseringsnivåer.
Den ideelle kvantiseringskarakteristikken har formen vist i fig. 3,92.
Kvantisering er avrunding analog verdi til nærmeste kvantiseringsnivå, dvs. den maksimale kvantiseringsfeilen er ±0,5h (h er kvantiseringstrinnet).
Hovedkarakteristikkene til ADC inkluderer antall biter, konverteringstid, ikke-linearitet osv. Antall biter er antall biter av koden assosiert med den analoge verdien som ADC kan produsere. Folk snakker ofte om oppløsningen til en ADC, som bestemmes av det gjensidige av det maksimale antallet kodekombinasjoner ved ADC-utgangen. Dermed har en 10-bits ADC en oppløsning på (2 10 = 1024) −1, dvs. med en ADC-skala som tilsvarer 10V, overstiger ikke den absolutte verdien av kvantiseringstrinnet 10mV. Konverteringstid tp er tidsintervallet fra øyeblikket av en gitt signalendring ved ADC-inngangen til den tilsvarende stabile koden vises ved utgangen.
Typiske konverteringsmetoder er følgende: parallell konvertering av en analog verdi og seriell konvertering.
ADC med parallell konvertering av analogt inngangssignal
I parallellmetoden sammenlignes inngangsspenningen samtidig med n referansespenninger og bestemmes mellom hvilke to referansespenninger den ligger. I dette tilfellet oppnås resultatet raskt, men ordningen viser seg å være ganske kompleks.
Driftsprinsipp for ADC (fig. 3.93)
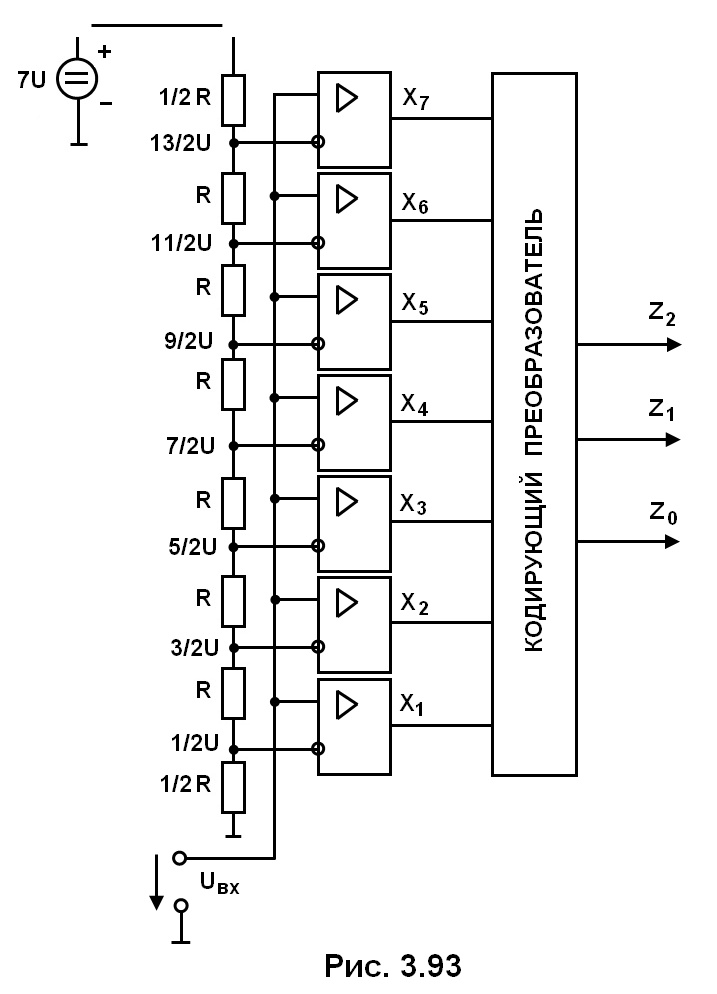
Når Uin = 0, siden for alle op-ampere spenningsforskjellen (U + − U −)< 0 (U + , U − - напряжения относительно общей точки соответственно неинвертирующего и инвертирующего входа), напряжения на выходе всех ОУ равны −Е пит а на выходах кодирующего преобразователя (КП) Z 0 , Z 1 , Z 2 устанавливаются нули. Если U вх >0,5U, men mindre enn 3/2U, bare for den nedre op-ampen (U + − U −) > 0 og kun ved utgangen vises +E-forsyningsspenningen, noe som fører til at følgende signaler vises ved CP-utganger: Z 0 = 1, Z 2 = Z l = 0. Hvis Uin > 3/2U, men mindre enn 5/2U, vises en spenning +E-forsyning ved utgangen av de to nedre op-ampene, som leder til utseendet til kode 010 ved utgangene til CP, etc.
Se en interessant video om ADC-drift:
ADC med seriell inngangssignalkonvertering
Dette er en seriell tellende ADC, som kalles en servo ADC (fig. 3.94).  ADC av denne typen bruker en DAC og en reverseringsteller, hvor signalet gir en endring i spenningen ved DAC-utgangen. Kretsen er konfigurert på en slik måte at spenningene ved inngangen Uin og utgangen til DAC −U er omtrent like. Hvis inngangsspenningen Uin er større enn spenningen U ved DAC-utgangen, byttes telleren til direkte tellemodus og koden ved utgangen øker, noe som gir en økning i spenningen ved DAC-utgangen. I øyeblikket for likhet mellom Uin og U stopper tellingen og koden som tilsvarer inngangsspenningen fjernes fra utgangen til reverstelleren.
ADC av denne typen bruker en DAC og en reverseringsteller, hvor signalet gir en endring i spenningen ved DAC-utgangen. Kretsen er konfigurert på en slik måte at spenningene ved inngangen Uin og utgangen til DAC −U er omtrent like. Hvis inngangsspenningen Uin er større enn spenningen U ved DAC-utgangen, byttes telleren til direkte tellemodus og koden ved utgangen øker, noe som gir en økning i spenningen ved DAC-utgangen. I øyeblikket for likhet mellom Uin og U stopper tellingen og koden som tilsvarer inngangsspenningen fjernes fra utgangen til reverstelleren.
Den sekvensielle konverteringsmetoden er også implementert i tidspulskonverteringen ADC (ADC med en lineært varierende spenningsgenerator (GLIN)).
Driftsprinsippet til ADC-en under vurdering, fig. 3.95) er basert på å telle antall pulser i tidsperioden der den lineært varierende spenningen (LIN), økende fra null, når inngangsspenningsnivået Uin. Følgende betegnelser brukes: CC - sammenligningskrets, GI - pulsgenerator, Kl - elektronisk nøkkel, Sch - pulsteller. 
Tidspunktet t 1 markert i tidsdiagrammet tilsvarer begynnelsen av målingen av inngangsspenningen, og tidspunktet t 2 tilsvarer likheten mellom inngangsspenningen og GLIN-spenningen. Målefeilen bestemmes av tidskvantiseringstrinnet. Nøkkel Kl kobler en pulsgenerator til telleren fra det øyeblikket målingen starter til det øyeblikket U in og U leire er like. U Sch angir spenningen ved målerens inngang.
Koden ved tellerutgangen er proporsjonal med inngangsspenningen. En av ulempene med denne ordningen er dens lave ytelse.

Dobbel integrering ADC
En slik ADC implementerer metoden for sekvensiell konvertering av inngangssignalet (fig. 3.96). Følgende betegnelser brukes: SU - styresystem, GI - pulsgenerator, SCH - pulsteller. Driftsprinsippet til ADC er å bestemme forholdet mellom to tidsperioder, hvorav den ene inngangsspenningen Uin er integrert av en op-amp-basert integrator (spenningen U og ved integratorutgangen endres fra null til maksimal absolutt verdi), og i løpet av neste - integrasjonen av referansespenningen U op (U og varierer fra maksimal absolutt verdi til null) (fig. 3.97). 
La inngangssignalintegrasjonstiden t 1 være konstant, så jo større den andre tidsperioden t 2 (tidsperioden som referansespenningen er integrert), jo større er inngangsspenningen. Key KZ er designet for å sette integratoren til dens opprinnelige nulltilstand. I den første av de indikerte tidsperiodene er nøkkelen K1 lukket, nøkkelen K2 er åpen, og i den andre tidsperioden er deres tilstand motsatt av den indikerte. Samtidig med at nøkkelen K 2 lukkes, begynner pulser fra GI-pulsgeneratoren å strømme gjennom kontrollkretsen til kontrollsystemet til telleren Sch.
Ankomsten av disse pulsene slutter når spenningen ved integratorutgangen er null.
Spenningen ved integratorutgangen etter en tidsperiode t 1 bestemmes av uttrykket
U og (t 1) = − (1/RC) t1 ∫ 0 U inngang dt= − (U inngang t 1) / (RC)
Ved å bruke et lignende uttrykk for tidsintervallet t 2 får vi
t 2 = − (R·C/U op) ·U og (t 1)
Ved å erstatte uttrykket her med U og (t 1), får vi t 2 = (U in / U op) · t 1 hvorfra U in = U oa · t 2 /t 1
Koden ved tellerutgangen bestemmer verdien på inngangsspenningen.
En av hovedfordelene med ADC av denne typen er dens høye støyimmunitet. Tilfeldige inngangsspenningsstøt som oppstår over kort tid har praktisk talt ingen effekt på konverteringsfeilen. Ulempen med ADC er dens lave hastighet.
De vanligste er ADC-er av brikkeseriene 572, 1107, 1138 osv. (Tabell 3.3)  Tabellen viser at parallellkonvertering ADC har best ytelse, og seriekonvertering ADC har dårligst ytelse.
Tabellen viser at parallellkonvertering ADC har best ytelse, og seriekonvertering ADC har dårligst ytelse.
Vi inviterer deg til å se en annen anstendig video om driften og utformingen av ADC:
4. Konverter analogt signal til digitalt. Introduksjon til spesialiteten
4. Konverter analogt signal til digitalt
Digitale signaler
Digital telefoni utvikler seg nå aktivt over hele verden. Digital kvalitet telefonkommunikasjon betydelig høyere enn vanlig, siden digitale signaler er mindre utsatt for alle typer forstyrrelser. Digital telefon lar oss yte mye tilleggstjenester. Det blir mulig å koble tilsynelatende helt forskjellige enheter til samme telefonlinje – et telefonapparat og en personlig datamaskin. Via digital telefonnett eiere av personlige datamaskiner har tilgang til databanker med bred rekkevidde informasjon.
Digital kabel-TV kommer til våre hjem, og gir ekstraordinær bildeklarhet og rike farger; I butikkhyllene kan vi se digitalt lyd- og videoopptaksutstyr som gir unik lyd- og bildekvalitet. Hva er det digitalt signal? Vi møtte det først da vi diskuterte et faksimilesignal hentet fra et svart-hvitt-bilde som ikke inneholder halvtoner.
Digitale signaler er telegraf- og datasignaler generert av datamaskiner. Dermed kan vi si at et digitalt signal er en sekvens av pulser. Hvis vi betinget tar det faktum at tilstedeværelsen av en puls er 1, og faktumet av dens fravær som 0, så kan pulssekvensen representeres som en veksling av to sifre: 0 og 1. Det er her navnet "digitalt signal " kommer fra. Et tall som bare har to verdier: 0 og 1 kalles et "binært siffer". Oversatt til engelsk høres det ut som "binært siffer". En forkortelse som består av de første og siste bokstavene i en engelsk setning har kommet i utbredt praksis, dvs. ordet "bit", som på engelsk lyder som bit. Så en posisjon i et digitalt signal er 1 bit; det kan være enten 0 eller 1. De åtte posisjonene i et digitalt signal er forent av konseptet byte. Ved overføring av digitale signaler introduseres konseptet naturlig nok overføringshastighet er antall biter som sendes per tidsenhet, oftest per sekund.
Analog signalprøvetaking
Av natur er mange signaler (telefon, faks, TV) ikke digitale. Dette er analoge eller kontinuerlige signaler. Er det mulig å "oversette" levende menneskelig tale til språket til nuller og enere, samtidig som man bevarer alle de rike fargevariasjonene til den menneskelige stemmen, hele spekteret av menneskelige følelser? Det handler med andre ord om hvordan man kan erstatte en kontinuerlig prosess med en tallsekvens uten å miste informasjon om den kontinuerlige prosessen.
MED lignende problem vi møter ganske ofte i livet. Hvis vi med veldig korte tidsintervaller (f.eks. etter 1 s) plotter lufttemperaturverdiene på en graf, vil vi få mange punkter som reflekterer temperaturendringen (fig. 4.1). Dermed har vi ikke å gjøre med en kontinuerlig kurve for temperaturendringer, men bare med verdiene målt med visse intervaller. I hovedsak beskrev vi en kontinuerlig prosess med en sekvens av desimaler. En slik prosess kalles prøvetaking kontinuerlig signal. Spørsmålet er fortsatt uklart hvor ofte leseverdier av en kontinuerlig kurve bør tas for å spore alle endringene. Dermed, med lengre tidsintervaller mellom observasjoner av lufttemperatur, er det ikke mulig å spore alle dens raske endringer.

En lignende tilnærming ligger i prosessen med å prøve et telefonsignal. Hvis i mikrofonkretsen (fig. 4.2), hvor strømmen er kontinuerlig funksjon tid, bygger inn en elektronisk nøkkel og stenger den med jevne mellomrom i korte øyeblikk, så vil strømmen i kretsen ha form av smale pulser med amplituder som gjentar formen til et kontinuerlig signal, og vil ikke representere noe mer enn et diskret signal (se Fig. 4.2). Tidsintervallet som verdiene til et kontinuerlig signal telles gjennom kalles prøvetakingsintervall. Den gjensidige størrelsen (la oss betegne det) kalles samplingsfrekvensen, eller prøvetakingshastighet.

Prøver av et kontinuerlig signal, akkurat som temperaturprøver, bør tas med en slik frekvens (eller med et slikt tidsintervall) for å ha tid til å spore alle, selv de raskeste, endringene i signalet. Ellers, når du gjenoppretter dette signalet fra diskrete prøver, vil deler av informasjonen gå tapt og formen på det gjenopprettede signalet vil avvike fra formen til det originale (fig. 4.3). Dette betyr at den mottatte lyden vil bli oppfattet med forvrengning. For å forstå dette problemet, la oss starte med vibrasjonen av strengen. Du berørte strengen, den begynte å vibrere og med sin bevegelse enten komprimerte eller tømte luften ut eller, med andre ord, enten økt eller redusert trykket. Lag av luft med høyt og lavt trykk begynte å spre seg i alle retninger fra den oscillerende kroppen. Det ble dannet en lydbølge. Vi ser noe lignende når vi kaster steiner i vannet og ser på bølgene som sprer seg i sirkler. Toppene av disse bølgene kan sammenlignes med området trykkluft, depresjoner – med et område med forsjeldne luft. Trykket til en lydbølge som forplanter seg fra en streng varierer med tiden i henhold til en sinusoid. For å spore alle endringene er det åpenbart nok å ta referanseverdier i øyeblikkene som tilsvarer maksima og minimum for sinusoiden, dvs. med en frekvens som overstiger i det minste to ganger frekvensen av lydvibrasjoner. For eksempel, hvis en streng lager 20 vibrasjoner/s (frekvens 20 Hz), så vil det maksimale lydtrykket bli observert hvert 1/20 s, dvs. etter 50 ms. Maksima og minima for lydtrykkkurven er atskilt med 25 ms intervaller. Dette betyr at avlesningsverdiene langs kurven må følge minst hver 25. ms, eller med en frekvens på 40 avlesninger/s (40 Hz). Vanligvis er referanseverdiene på kurven tatt "med en margin": ikke 2 ganger oftere enn lyden svinger, men for eksempel 10 ganger. I dette tilfellet formidler de formen på kurven veldig bra. Et interessant tilfelle er når lydbølger sendes ut av to samtidig vibrerende strenger. I fig. Figur 4.4 viser tre alternativer: den andre strengen vibrerer 2, 3 og 10 ganger oftere enn den første. Trykkene fra to lydbølger på en plate plassert i deres vei legges til. Den resulterende trykkgrafen er ikke lenger en sinusformet. Vi ser at de raske endringene i denne kurven skyldes den høyere frekvensoscillasjonen (kl i dette tilfellet vibrasjon av den andre strengen). For å spore alle de raske endringene i det resulterende lydtrykket, bør prøver tas med en frekvens som er minst det dobbelte av vibrasjonsfrekvensen til den andre strengen. I det siste alternativet må samplingsfrekvensen overstige 400 Hz. Dette betyr at avlesningsverdiene bør følge minst hver 1/400 = 0,0025 s = 2,5 ms, eller enda bedre, enda oftere, for eksempel hver 0,5 ms. Når vi studerte tale, fant vi ut at de menneskelige stemmebåndene spiller rollen som strenger. Den høyeste frekvensvibrasjonen til disse "strengene", som ifølge ITU-anbefalingene fortsatt må tas i betraktning, har en frekvens på 3400 Hz. Når du går fra et analogt til et digitalt talesignal, avrundes denne verdien vanligvis til 4000 Hz. Dette betyr at når du erstatter en kontinuerlig kurve elektrisk strøm ved mikrofonutgangen telefonapparat sistnevnte må tas med referanseverdier ved en frekvens på 8000 Hz eller, med andre ord, ikke mindre enn hver 1/8000 = 0,000125 s = 125 μs.

For å gjenopprette det originale signalet fra et diskret signal, er det nok å sende det diskrete signalet gjennom et lavpassfilter med en grensefrekvens for passbåndet F og undertrykke alle "side" spektre. Utgangen til et slikt filter vil være det originale kontinuerlige signalet. Hvis samplingen er for sparsom (lav samplingsfrekvens og stort samplingsintervall), vil det være en overlapping av "side"-spekteret på spekteret til det originale signalet. Dette vil føre til en forvrengning av formen til det opprinnelige spekteret, og derfor til en forskjell mellom det rekonstruerte signalet og det opprinnelige. Tvert imot vil hyppigere sampling gjøre det enkelt å rekonstruere et kontinuerlig signal fra et diskret ved hjelp av et enkelt lavpassfilter. Dermed, For forvrengningsfri gjenoppretting av et kontinuerlig signal fra et diskret signal, kreves det en samplingsfrekvens velg ikke lavere enn to ganger bredden av spekteret. For et telefonsignal, slik vi ser det, = = 8 kHz. I 1933, i verket "O båndbredde«eter» og ledning i telekommunikasjon» V.A. Kotelnikov beviste et teorem som ble grunnleggende i teorien og teknologien til digital kommunikasjon. Essensen av denne teoremet er at et kontinuerlig signal hvis spektrum er begrenset av frekvens F, kan rekonstrueres fullstendig og entydig fra sine diskrete prøver tatt med frekvens = 2 F, dvs. med mellomrom. Vi presenterer ikke den fullstendige matematiske formuleringen av teoremet, så vel som bevis for det, men begrenser oss bare til å indikere essensen av teoremet.
Kvantisering
La, som et resultat av sampling et kontinuerlig signal s(t) ble det oppnådd en sekvens med smale pulser, som representerer et AIM-signal. Pulsamplitudene er like i dette tilfellet øyeblikkelige verdier signal s(t) på øyeblikk hvor Jeg= 0, 1, 2, 3, ...; – pulsrepetisjonsperiode, eller samplingsintervall.

La oss utsette det mottatte AIM-signalet for kvantisering etter nivå (fig. 4.5). For å gjøre dette deles området av mulige amplitudeverdier (dvs. verdiområdet til primærsignalet) inn i segmenter kalt kvantiseringstrinn. Grensene til disse segmentene er tillatt for overføring av pulsamplitudeverdier. Dermed vil amplitudene til de overførte pulsene ikke være lik de øyeblikkelige verdiene til primærsignalet, men til de nærmeste tillatte nivåene. Denne transformasjonen av primærsignaler kan kalles kvantisert pulsamplitudemodulasjon(KAIM). Et trekk ved KAIM-signalet er at alle nivåene kan nummereres (og antallet, selv om det er stort, er begrenset) og dermed redusere overføringen av KAIM-signalet til overføringen av sekvenser av nivåtall som dette signalet mottar i øyeblikk. Hvis kvantiseringstrinnene er de samme og ikke avhenger av kvantiseringsnivået, kalles kvantiseringen enhetlig. Uensartet kvantisering er mulig, der kvantiseringstrinnene er forskjellige. Under kvantiseringsprosessen oppstår det en feil på grunn av at det overførte kvantiserte signalet er forskjellig fra det sanne. Denne feilen kan betraktes som en spesifikk interferens - kvantiseringsstøy. Sistnevnte er en tilfeldig sekvens av pulser (fig. 4.6), hvis maksimale amplitude ikke overstiger halve kvantiseringstrinnet. Jo mindre kvantiseringstrinnet er, jo mindre støy, men større antall overførte tillatte nivåer. Det neste trinnet i signalkonvertering er å konvertere det kvantiserte AIM-signalet til et digitalt. Denne operasjonen kalles koding KAIM-signal.
Koding
La oss bli kjent med en bemerkelsesverdig egenskap ved tallsystemet vårt - posisjonalitet. La oss skildre et tall, for eksempel 777. I det brukes det samme tegnet "7" 3 ganger, men når det er til høyre, betyr det syv enheter, i midten - syv tiere, til venstre - syv hundre. Når du skriver et tall, kan sifferet ha samme omriss, men de digitale betydningene kan være forskjellige, avhengig av stedet, posisjonen, sifferet det står på. Dette prinsippet for å konstruere tall kalles sted eller posisjonelt. For å skrive vilkårlig store tall, er ti sifre nok! Hver posisjon, eller siffer, i et tall har en viss "vekt" (enheter, tiere, hundrevis, osv.), så tallet 777 kan skrives som
777 = 7 × 10 2 + 7 × 10 + 7,
de. som syv hundre pluss sju tiere pluss syv enere. Hvis du ringer til algebra for å hjelpe og skriver bokstaver i stedet for tall, kan du få følgende generell form tallrepresentasjoner:
eller forkortet - gjennom koeffisienter, hvis vi utelater potensene til 10:
.
Tallet 10 er grunnlaget for tallsystemet. Koeffisienter (antall enheter), (antall enheter av den andre kategorien, dvs. tiere), (antall enheter av den tredje kategorien, dvs. hundrevis), etc. kan ta verdier som ikke overstiger basen til systemet: fra 0 til 9. I 1665 viste den franske matematikeren B. Pascal at et hvilket som helst tall kan tas som basis for tallsystemet, noe som betyr at hvert tall kan representeres som en kombinasjon av potenser av ikke et tall 10, et annet heltall. La oss velge for eksempel tallet 7:
Det er klart at verdiene til koeffisientene ![]() skal nå ikke være mer enn den nye stiftelsen, dvs. 7: de kan ta verdier fra 0 til 6. La oss representere tallet 777 i det syvårige systemet, utvide det i potensene til grunntallet 7:
skal nå ikke være mer enn den nye stiftelsen, dvs. 7: de kan ta verdier fra 0 til 6. La oss representere tallet 777 i det syvårige systemet, utvide det i potensene til grunntallet 7:
.
Hvis vi utelater potensene til tallet 7, slik vi gjør når vi skriver tall i desimalsystemet, får vi en syv-representasjon av dette tallet: (2160)7. Her indikerer tallet 7 i indeksen basen til systemet. I det femdobbelte posisjonssystemet er det bare fem sifre: 0, 1, 2, 3, 4. I det vil tallet 777 bli representert med antall "fem", "tjuefem", etc.:
.
La oss se hvordan tallet 777 er representert i det duodesimale systemet. Siden den skal ha tolv sifre, og vi bare kjenner ti, må vi legge inn to sifre til, som angir 10, for eksempel, med bokstaven A, og 11 med bokstaven B. Resultatet blir
.
Som du ser kan du finne på mange forskjellige posisjoneringssystemer tall som bare er forskjellige i basene. Og alle av dem, generelt sett, er likeverdige: ingen av dem har åpenbare fordeler fremfor den andre Tallet 2 er det minste tallet som kan tas som grunnlag for tallsystemet. Derfor, i binært system nummerering har kun to sifre: 0 og 1. Tallet i det binære systemet vil bli skrevet slik:
.
Hvis i desimalsystem"Vekten" til hver posisjon (eller siffer) i et tall er til en viss grad lik tallet 10, og i det binære systemet brukes tallet 2 i stedet for tallet 10. "Vektene" til de første 13 posisjoner (biter) av et binært tall har følgende betydninger:
La oss prøve å skrive tallet (777)10, som allerede er kjent for oss, i det binære tallsystemet, representere det i form av en utvidelse i potenser av to og deretter forkaste potensene selv når du skriver:
Så i det binære tallsystemet, i stedet for tallet 777, må du skrive tallet 1100001001. Når du skriver et tall i det binære systemet, er hver posisjon okkupert av et binært siffer. I stedet for to ord "binært siffer", brukes ett ord: "bit". Vi har allerede nevnt at det kommer fra den engelske "bit", som består av de første og siste bokstavene i uttrykket "binært siffer", som betyr "binært siffer" på engelsk. Med en bit kan du bare skrive tallene 0 og 1, to biter - tall fra 0 til 3, tre biter - tall fra 0 til 7, fire biter - tall fra 0 til 15, etc.
Desimalnotasjon: |
||||||||||||||
Binær notasjon: |
||||||||||||||
For å skrive tallene fra 0 til 1000 trenger du ti biter. I det binære tallsystemet opptar selv et relativt lite tall mange posisjoner. Hvordan oversette nå diskrete verdier mikrofon strøm inn i digital binær kode? På 1700-tallet viste den store matematikeren L. Euler at ved å bruke et sett med vekter 1, 2, 4, 8 og 16 kg, kan du veie hvilken som helst last med en nøyaktighet på 1 kg. Lasten som veies (vi betegner dens masse med M, kg) kan representeres matematisk som
Hvor er hver koeffisient en= 1, hvis den tilsvarende vekten er plassert på vekten, en= 0, hvis vi ikke bruker denne vekten ved veiing. Dermed reduseres veiingsprosedyren til å representere et desimaltall i det binære tallsystemet. La oss forklare dette med et eksempel. Anta at vi må veie en last som veier 21 kg. La oss først plassere den største vekten på vekten – som veier 16 kg. Siden den ikke trekker lasten, vil vi la vekten stå på bollen ( = 1) og legge til den neste - 8 kg. Det er klart at i dette tilfellet vil vektene med vekter oppveie de vektede vektene. La oss fjerne denne vekten ( = 0) og installere en vekt på 4 kg. Etter å ha utført veiingen til slutten, vil vi se at vekter som veier 16, 4 og 1 kg forblir på vekten. Koeffisientverdiene gir et femsifret binær kode 10101 nummer 21. Vi veide den mekaniske lasten på en mekanisk vekt. Tatt i betraktning referanseverdien til strømmen som vises ved utgangen til den elektroniske nøkkelen som en slags "elektrisk belastning", er det mulig å utføre en lignende veiing, men denne gangen elektronisk . Slike "elektroniske skalaer" ble kalt en encoder (fra den engelske soder - encoder). La oss si at gjeldende referanseverdi er 21 mA. Rollen til "elektriske vekter" i koderen utføres av referansestrømmer på 16, 8, 4, 2 og 1 mA, som genereres av en spesiell enhet. Hver test - enten en eller annen "vekt" passer eller ikke - utføres med strengt fastsatte intervaller. Hele veiingsprosedyren må fullføres før neste gjeldende avlesningsverdi kommer fra den elektriske bryteren (husk, for talelyder er denne tiden kun 125 μs). Så først blir den samplede strømverdien sammenlignet med referanseverdien på 16 mA, og siden den er større enn referanseverdien, vises en strømpuls ved utgangen av koderen, som tilsvarer binærsifferet 1. I neste gang intervall, legges en andre verdi på 8 mA til den første referansestrømmen. Nå er den totale vekten av den "elektriske vekten" 24 mA. Dette er større enn referanseverdien, så den andre referanseoscillatoren er slått av. I løpet av dette tidsintervallet vises ikke strømpulsen ved utgangen til koderen, som tilsvarer det binære sifferet 0. Vi tror at leserne enkelt vil fullføre veieprosedyren. I løpet av veiingen av én prøveverdi genererer koderen således en serie pulser som fullstendig gjentar den binære koden til prøveverdien til mikrofonstrømmen. Det er umulig å ikke huske igjen en annen type forvrengning som dukker opp når referanseverdien konverteres til binær kode. Således, hvis en prøveverdi på 21,7 mA er kodet, vil koderen fortsatt sende ut kode 10101, som i tilfellet med heltallsverdien 21 mA. Dette er forståelig, siden "veiingen" ble utført med en nøyaktighet på 1 mA - vekten av den minste "elektriske vekten". Denne avrundingen av tall i teknologi kalles kvantisering, og forskjellen mellom referanseverdien til strømmen og verdien som er skrevet inn i binærkoden er kvantiseringsfeilen. Imidlertid kan forvrengninger forårsaket av kvantiseringsfeil bli, om ikke fullstendig eliminert, så i det minste betydelig redusert. La for eksempel den minste "elektriske vekten" ha en "vekt" på 0,125 mA. Deretter tar du åtte "vekter" tilsvarende 16; 8; 4; 2; 1; 0,5; 0,25; 0,125 mA, vil det være mulig å "veie" strømavlesningene med en nøyaktighet på 0,125 mA. I dette tilfellet vil tallet 21 representeres av den 8-biters binære koden 10101000, og tallet 21.7 – med koden 10101101, der de tre siste sifrene betyr tillegget av 0,625 til tallet 21. Bruken av en 12- bit binær kode lar deg skrive veldig nær den i stedet for tallet 21.7, tallet er 21.6921895. Fremskritt i utviklingen av integrert kretsteknologi har gjort det mulig å kombinere en elektronisk nøkkel og en koder i huset til en liten mikrokrets. Denne brikken konverterer en kontinuerlig (ofte sagt analog) elektrisk mengde til en binær digital kode og er kjent som analog-til-digital omformer(ADC). ADC-er er tilgjengelige med 8-, 10- og 12-bits binære koder. Det er interessant å beregne hastigheten til en digital strøm hentet fra et kontinuerlig telefonsignal ved å prøve den ved 125 μs og 8-bits koding. Mikrofonstrømmen endres 8000 ganger per sekund. I en 8-bits koder er hver målte strømverdi representert som et 8-bits binært ord. Dette betyr at hver andre 8000 × 8 = 64000 biter sendes til linjen, dvs. den digitale strømmehastigheten er 64 kbit/sek.
Kodekombinasjonen av 8 biter som danner et binært ord kalles byte. Tegnene i hver kodekombinasjon er atskilt fra hverandre med et tidsintervall t slips. følger med hyppighet. Denne frekvensen kalles klokke. Konvertering av kontinuerlige signalprøver til binær kode kalles pulskodemodulasjon(ICM). For tiden er denne metoden for å oppnå digitale signaler fra analoge den vanligste. Overføringssystemer som bruker denne signalkonverteringen kalles PCM-systemer. I utenlandsk litteratur brukes forkortelsen PCM (fra de engelske ordene pulse code modulering, som i oversettelse betyr pulskodemodulasjon).
Analog signalgjenoppretting
Alle enheter designet for signaldemodulering vil bli vurdert når man studerer spesifikke overføringssystemer og utstyret som inngår i disse systemene. Når du mottar PCM-signaler, for å gjenopprette det analoge signalet, er det nødvendig å konvertere det digitale signalet (en sekvens av binære pulser) til et kvantisert AIM-signal (denne konverteringen kalles dekoding) og utfør deretter demodulasjonsoperasjonen, dvs. trekke ut et analogt signal fra AIM-signalet s(t). Så når du bruker PCM, utføres følgende analoge signaltransformasjoner: ved overføringspunktet - pulsamplitudemodulasjon, kvantisering og koding; ved mottakspunktet - dekoding og demodulering av det kvantiserte AIM-signalet. Det analoge signalet mottatt ved mottak er forskjellig fra det overførte, siden det er dannet av kvantiserte pulser, hvis amplituder er lik ikke-øyeblikkelige signalverdier s(t), og de nærmeste tillatte verdiene. Dermed introduserer kvantiseringsoperasjonen en uløselig feil i signaloverføringsprosessen, som er mindre jo flere kvantiseringsnivåer det er. Hvordan kan du finne ut hvilket desimaltall som er skjult under notasjonen i det binære systemet? Regelen er enkel: Under hvert siffer i et binært tall skal "vekten" skrives ned. De "vektene" som tilsvarer enhetssifrene må legges til. Det resulterende beløpet vil være et desimaltall. Her har vi tallet 1001011, skrevet i binær nummerering. Vi fortsetter som nevnt ovenfor:

Som du kan se, består tallet som interesserer oss av en, to, åtte og sekstifire (1 + 2 + 8 + 64). Det er åpenbart lik 75. Prøv selv å finne ut hvilket nummer dens binære notasjon 10110011 tilsvarer. Dekoderen inkluderer en seriell-til-parallell kodeomformer (fig. 4.7), ved utgangene som et sett med enere og nuller. vises, tilsvarende den aksepterte kodekombinasjonen. Hver enhet (strømpuls) går til inngangen til addereren med en vekt, hvor den øker med 2 k en gang. En puls vises ved utgangen til adderen, hvis amplitude bestemmes av kodekombinasjonen ved inngangen til dekoderen. For eksempel, når du passerer kodekombinasjonen 0100110, tilføres det ingen spenning til den første, fjerde, femte og syvende inngangen til addereren (ikke-strømpulser), men en spenning tilføres den andre, tredje og sjette inngangen, som øker med henholdsvis 2 1, 2 2 og 2 5 ganger. En spenning proporsjonal med 2 1 + 2 2 + 2 5 = 38 vises ved utgangen til addereren, dvs. kvantisert AIM-signal. Det neste trinnet er å oppnå en kontinuerlig strøm fra gjeldende avlesninger. En vanlig kondensator med liten kapasitet vil hjelpe oss å gjøre dette, som, når den kortvarig eksponeres for strøm (dvs. referanseverdien), umiddelbart vil lade og vil holde på ladningen til neste korttidseksponering. Merk igjen at den kontinuerlige strømkurven rekonstruert på denne måten vil være litt forskjellig fra den som oppnås ved mikrofonterminalene: den vil ha flate trinn mellom leseverdiene. Det kan sies at prosessen med å ta prøver og deretter rekonstruere en kontinuerlig mikrofonstrømbølgeform er ledsaget av spesifikke forvrengninger som kan påvirke kvaliteten på lydgjengivelsen. Men i praksis, for å gjenopprette strømmen, er det ikke en kondensator som brukes, men mer komplekse kretser som gjør formen på den gjenopprettede strømmen lik formen til den opprinnelige strømmen og dermed opphever effekten av disse forvrengningene.
Kontrollspørsmål
1. Hva er et digitalt signal?
2. Ved hvilken frekvens skal et analogt signal samples?
3. Hvordan bestemme signalkvantiseringsfeilen?
4. Hva er prinsippet for binær signalkoding?
5. Hvordan gjenopprette et analogt signal fra et digitalt?
Bibliografi
1. Kruk B.I., Popov G.N. ... Og den mystiske verden bak tallteppet: Digital kommunikasjon. – 2. utgave, rev. – Novosibirsk: CERIS, 2001. – 264 s.
2. Bakalov V.P., Dmitrikov V.F., Kruk B.I. Grunnleggende om kretsteori: Lærebok for universiteter; Ed. V.P. Bakalova. – M.: Radio og kommunikasjon, 2000. – 592 s.
3. Zhuravleva O.B., Kruk B.I. Diskrete signaler og kjeder: 26 spørsmål og svar: Opplæringen for fjernundervisning. – Novosibirsk: SibGUTI, 1999. – 100 s.
Før du forstår selve transformasjonene, må du vite hvilke signaler som finnes. Og det er 3 typer:
Analog
Diskret
Digital
Analog– dette er signaler som er kontinuerlige i tid, de er definert til alle tider. Diskret– dette er signaler representert av en sekvens av prøver, dvs. verdier av signaler på diskrete tidspunkter. Digital– dette er signaler diskrete i tid (eller i rom) og kvantisert i nivå. Beregningsprosedyrer i en datamaskin utføres i digitale signaler. For at datamaskinen skal behandle signalet, er det nødvendig å konvertere signalet fra analog til digital form. Etter prosessering utføres den inverse konverteringen siden de fleste husholdningsapparater styres av analoge signaler. Blokkdiagrammet for digital signalbehandling ser generelt slik ut:
Analog-til-digital signalkonvertering
Analog-til-digital signalkonvertering inkluderer to trinn:
Signalsampling (i tid eller rom)
Kvantisering etter nivå
Koding
Analog signalprøvetaking
Av natur er mange signaler (telefon, faks, TV) ikke digitale. Dette er analoge eller kontinuerlige signaler. Er det mulig å "oversette" levende menneskelig tale til språket til nuller og enere, samtidig som man bevarer alle de rike fargevariasjonene til den menneskelige stemmen, hele spekteret av menneskelige følelser? Det handler med andre ord om hvordan man kan erstatte en kontinuerlig prosess med en tallsekvens uten å miste informasjon om den kontinuerlige prosessen.

Vi møter et lignende problem i livet ganske ofte. Hvis vi med veldig korte intervaller (si etter 1 s) plotter lufttemperaturverdiene på en graf, vil vi få mange poeng som gjenspeiler endringen i temperaturen (fig.). Dermed har vi ikke å gjøre med en kontinuerlig kurve for temperaturendringer, men bare med verdiene målt med visse intervaller. I hovedsak beskrev vi en kontinuerlig prosess med en sekvens av desimaler. En slik prosess kalles prøvetaking kontinuerlig signal.
En lignende tilnærming ligger i prosessen med å prøve et telefonsignal. Hvis du integrerer en elektronisk bryter i mikrofonkretsen (fig.), der strømmen er en kontinuerlig funksjon av tiden, og periodisk lukker den i korte øyeblikk, vil strømmen i kretsen ha form av smale pulser med amplituder som gjentar seg formen til et kontinuerlig signal, og vil ikke representere noe mer enn som et diskret signal. Tidsintervallet som verdiene til et kontinuerlig signal telles gjennom kalles prøvetakingsintervall.

Prøver av et kontinuerlig signal, akkurat som temperaturprøver, bør tas med en slik frekvens (eller med et slikt tidsintervall) for å ha tid til å spore alle, selv de raskeste, endringene i signalet. Ellers, når du rekonstruerer dette signalet fra diskrete prøver, vil deler av informasjonen gå tapt og formen på det gjenopprettede signalet vil avvike fra formen til det originale. Dette betyr at den mottatte lyden vil bli oppfattet med forvrengning.
V.A. Kotelnikov beviste et teorem som ble grunnleggende i teorien og teknologien til digital kommunikasjon. Essensen av denne teoremet er at et kontinuerlig signal hvis spektrum er begrenset av frekvens F, kan rekonstrueres fullstendig og entydig fra sine diskrete prøver tatt med frekvens = 2 F, dvs. med mellomrom.
Kvantisering. La, som et resultat av sampling et kontinuerlig signal s(t) en sekvens av smale pulser ble oppnådd. Pulsamplitudene er i dette tilfellet lik de øyeblikkelige signalverdiene s(t) i øyeblikk i*t d, hvor Jeg= 0, 1, 2, 3, ...; t d – pulsrepetisjonsperiode, eller samplingsintervall.

La oss utsette det mottatte signalet kvantisering etter nivå (fig. 4.5). For å gjøre dette deles området av mulige amplitudeverdier (dvs. verdiområdet til primærsignalet) inn i segmenter kalt kvantiseringstrinn. Grensene til disse segmentene er tillatt for overføring av pulsamplitudeverdier. Dermed vil amplitudene til de overførte pulsene ikke være lik de øyeblikkelige verdiene til primærsignalet, men til de nærmeste tillatte nivåene.
Hvis kvantiseringstrinnene er de samme og ikke avhenger av kvantiseringsnivået, kalles kvantiseringen enhetlig. Uensartet kvantisering er mulig, der kvantiseringstrinnene er forskjellige.
Under kvantiseringsprosessen oppstår det en feil på grunn av at det overførte kvantiserte signalet er forskjellig fra det sanne. Denne feilen kan betraktes som en spesifikk interferens - kvantiseringsstøy. Sistnevnte er en tilfeldig sekvens av pulser (fig. 4.6), hvis maksimale amplitude ikke overstiger halve kvantiseringstrinnet.
Jo mindre kvantiseringstrinnet er, desto lavere er støyen, men jo større antall overførte tillatte nivåer.
Det neste trinnet i signalkonvertering er å konvertere det kvantiserte signalet til et digitalt. Denne operasjonen kalles koding signal.
Koding. La oss bli kjent med en bemerkelsesverdig egenskap ved tallsystemet vårt - posisjonalitet. La oss skildre et tall, for eksempel 777. I det brukes det samme tegnet "7" 3 ganger, men når det er til høyre, betyr det syv enheter, i midten - syv tiere, til venstre - syv hundre. Når du skriver et tall, kan sifferet ha samme omriss, men de digitale betydningene kan være forskjellige, avhengig av stedet, posisjonen, sifferet det står på. Dette prinsippet for å konstruere tall kalles sted eller posisjonelt. Ti sifre er nok til å skrive alle tall, uansett hvor store! Hver posisjon, eller siffer, i et tall har en viss "vekt" (enheter, tiere, hundrer, etc.), så tallet 777 kan skrives som 777 = 7 10 2 + 7 10 + 7, dvs. som syv hundre pluss sju tiere pluss syv enere.
Tallet 10 er grunnlaget for tallsystemet. Koeffisienter før tall (antall enheter av det andre sifferet, dvs. tiere), (antall enheter av det tredje sifferet, dvs. hundrevis), etc. kan ta verdier som ikke overstiger basen til systemet: fra 0 til 9.
I desimalsystemet er "vekten" til hver posisjon (eller siffer) i et tall til en viss grad lik tallet 10, men i det binære systemet brukes tallet 2 i stedet for tallet 10. "Vektene" ” av de første 13 posisjonene (bitene) av et binært tall har følgende betydninger:
La oss prøve å skrive tallet (777) 10 i det binære tallsystemet, representere det som en utvidelse i potenser av to og deretter forkaste potensene selv når du skriver: Så, i det binære tallsystemet, i stedet for tallet 777, har du å skrive tallet 1100001001. Når du skriver et tall i det binære systemet, opptas hver posisjon av et binært siffer. I stedet for to ord "binært siffer", brukes ett ord: "bit".
|
Desimalnotasjon: |
||||||||||||||
|
Binær notasjon: |
||||||||||||||
Kodekombinasjonen av 8 biter som danner et binært ord kalles byte. Tegnene i hver kodekombinasjon er atskilt fra hverandre med et tidsintervall t slips. følger med hyppighet. Denne frekvensen kalles klokke. Konvertering av kontinuerlige signalprøver til binær kode kalles pulskodemodulasjon(ICM). For tiden er denne metoden for å oppnå digitale signaler fra analoge den vanligste. Overføringssystemer som bruker denne signalkonverteringen kalles PCM-systemer. I utenlandsk litteratur brukes forkortelsen PCM (fra de engelske ordene pulse code modulering, som i oversettelse betyr pulskodemodulasjon).